


-
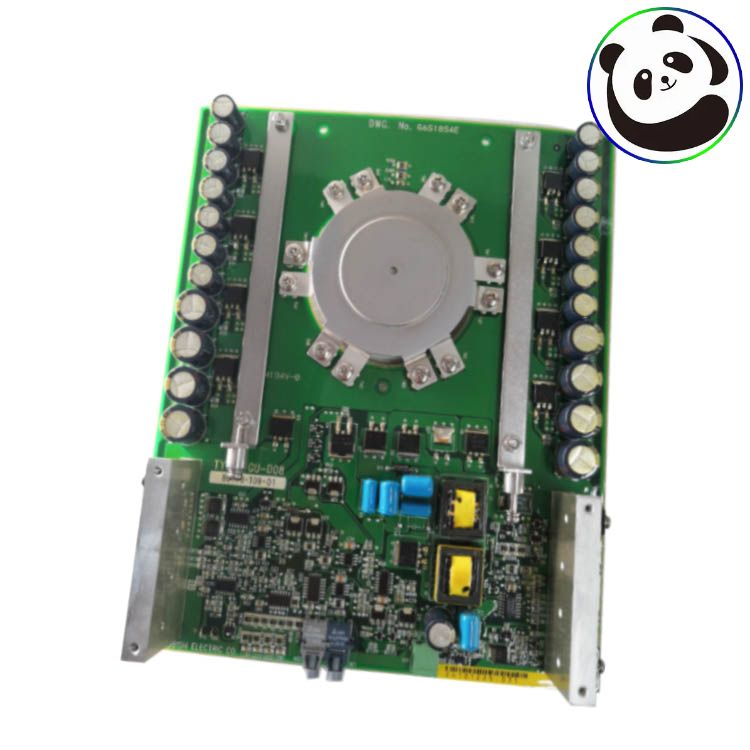
伺服控制器用于自动化系统以控制机器电机的位置、速度和加速度。它们通常用于机器人、CNC 机器和其他工业应用。
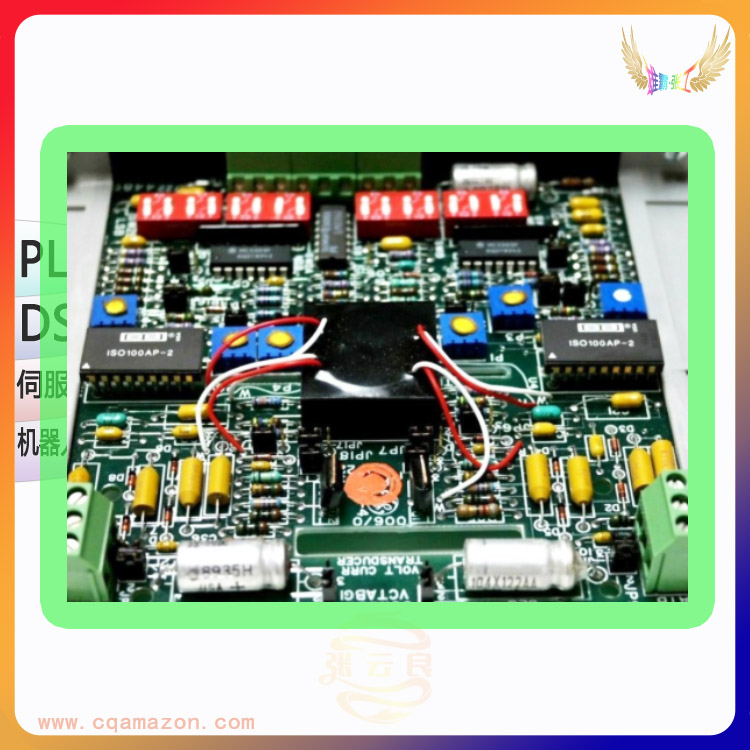
一种流行的伺服控制器类型是 PID 控制器,它代表比例-积分-微分。PID 控制器使用来自过程的反馈来调整其控制输出,目标是zui小化所需设定值和实际过程变量之间的误差。控制器的比例项根据误差的大小调整输出,积分项根据随时间累积的误差调整输出,微分项根据误差的变化率调整输出。
另一种伺服控制器是运动控制器,专为运动控制应用而设计。运动控制器可分为两类:独立式和基于PC的。独立运动控制器通常具有内置放大器并且可以控制多个轴,而基于 PC 的控制器则依靠在计算机上运行的软件来控制运动。
- KEBA CP253/W 模块

- KEBA CP253/W 模块



 客服1
客服1